

This Arduino-controlled soft robot gets around like an earthworm
— September 28th, 2020

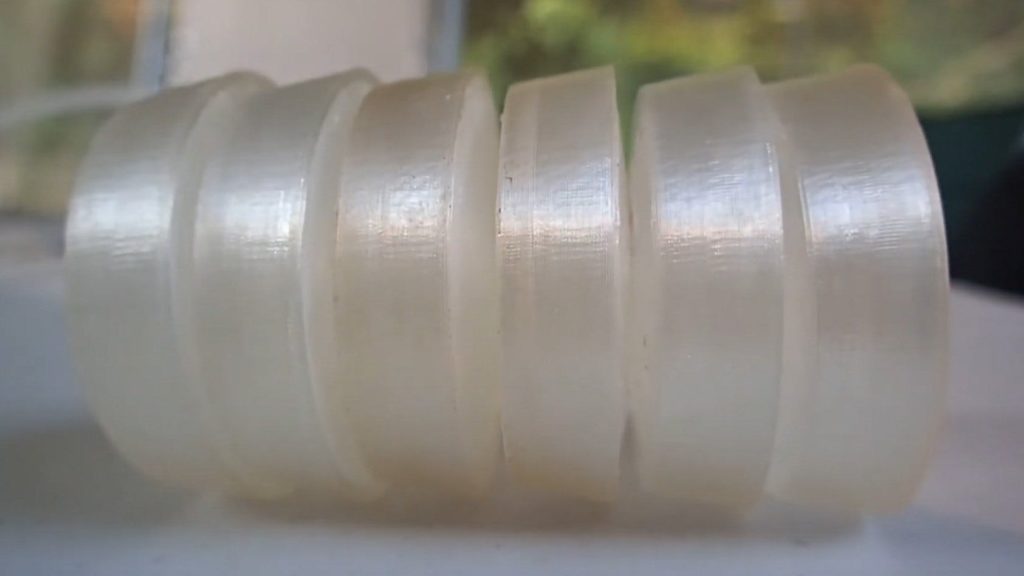
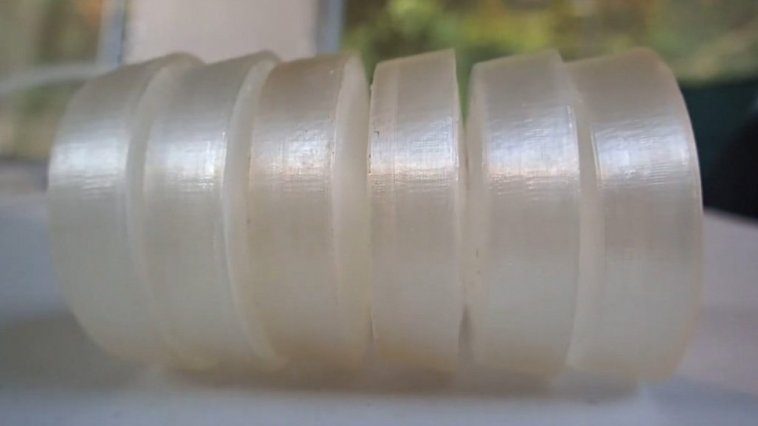
After studying the way a worm wiggles, Nicholas Lauer decided to create his own soft robotic version. What he came up with uses an Arduino Uno for control, inflating six 3D-printed segments sequentially to order to generate peristaltic motion for forward movement.
- Werbung -
The robotic worm uses a 12V mini diaphragm pump to provide inflation air, while a series of transistors and solenoid valves directly regulate the airflow into the chambers.
The build looks pretty wild in the video below, and per Lauer’s write-up, you’re encouraged to experiment to see what kind of timing produces the most expedient motion. Code, STLs, and a detailed BOM are available on GitHub.
- Werbung -

- Werbung -
Website: LINK

