

Your dog has nerve endings covering its entire body, giving it a sense of touch. It can feel the ground through its paws and use that information to gain better traction or detect harmful terrain. For robots to perform as well as their biological counterparts, they need a similar level of sensory input. In pursuit of that goal, the Autonomous Robots Lab designed TRACEPaw for legged robots.
TRACEPaw (Terrain Recognition And Contact force Estimation Paw) is a sensorized foot for robot dogs that includes all of the hardware necessary to calculate force and classify terrain. Most systems like this use direct sensor readings, such as those from force sensors. But TRACEPaw is unique in that it uses indirect data to infer this information. The actual foot is a deformable silicone hemisphere. A camera looks at that and calculates the force based on the deformation it sees. In a similar way, a microphone listens to the sound of contact and uses that to judge the type of terrain, like gravel or dirt.
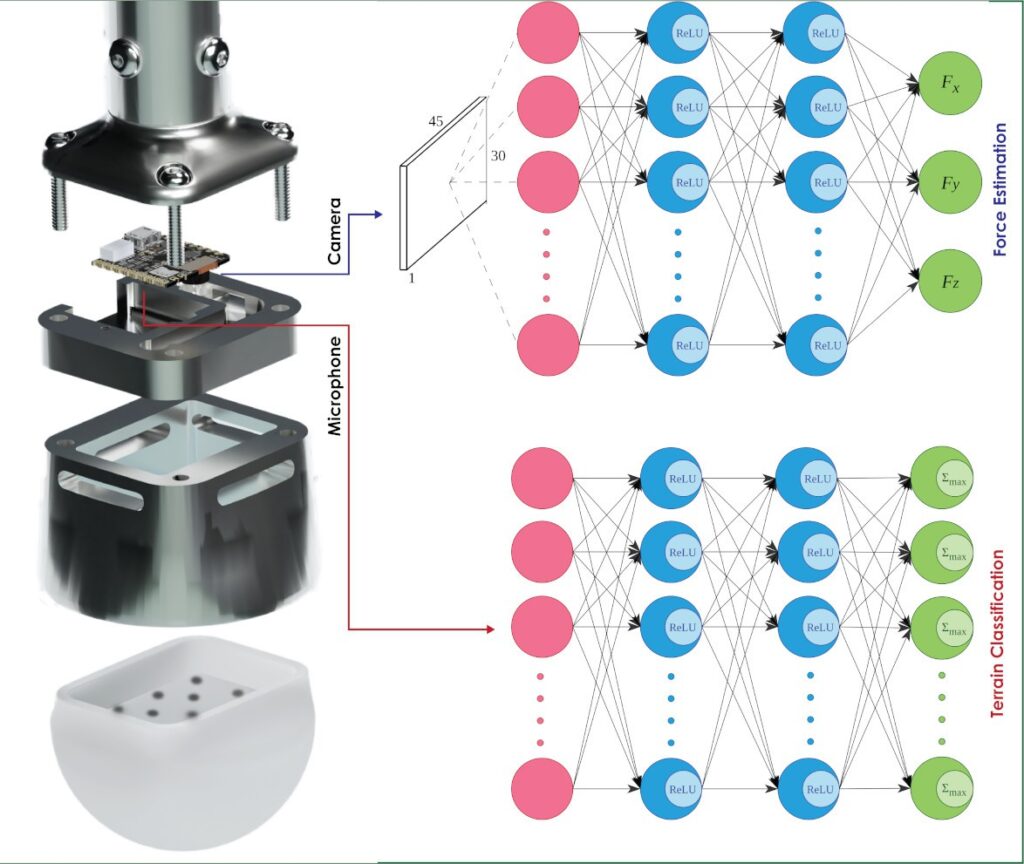
To keep TRACEPaw self-contained, Autonomous Robots Lab chose to utilize an Arduino Nicla Vision board. That has an integrated camera, microphone, six-axis motion sensor, and enough processing power for onboard machine learning. Using OpenMV and TensorFlow Lite, TRACEPaw can estimate the force on the silicone pad based on how much it deforms during a step. It can also analyze the audio signal from the microphone to guess the terrain, as the silicone pad sounds different when touching asphalt than it does when touching loose soil.
More details on the project are available on GitHub.
The post Helping robot dogs feel through their paws appeared first on Arduino Blog.
Website: LINK