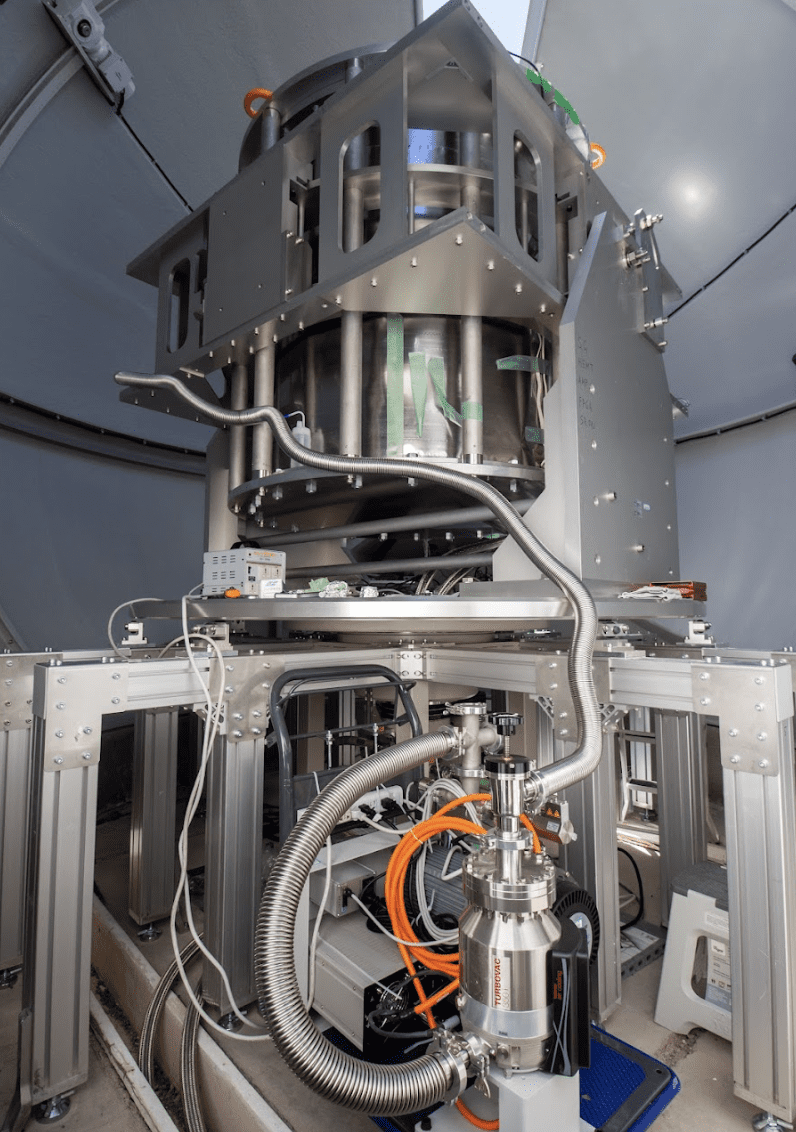
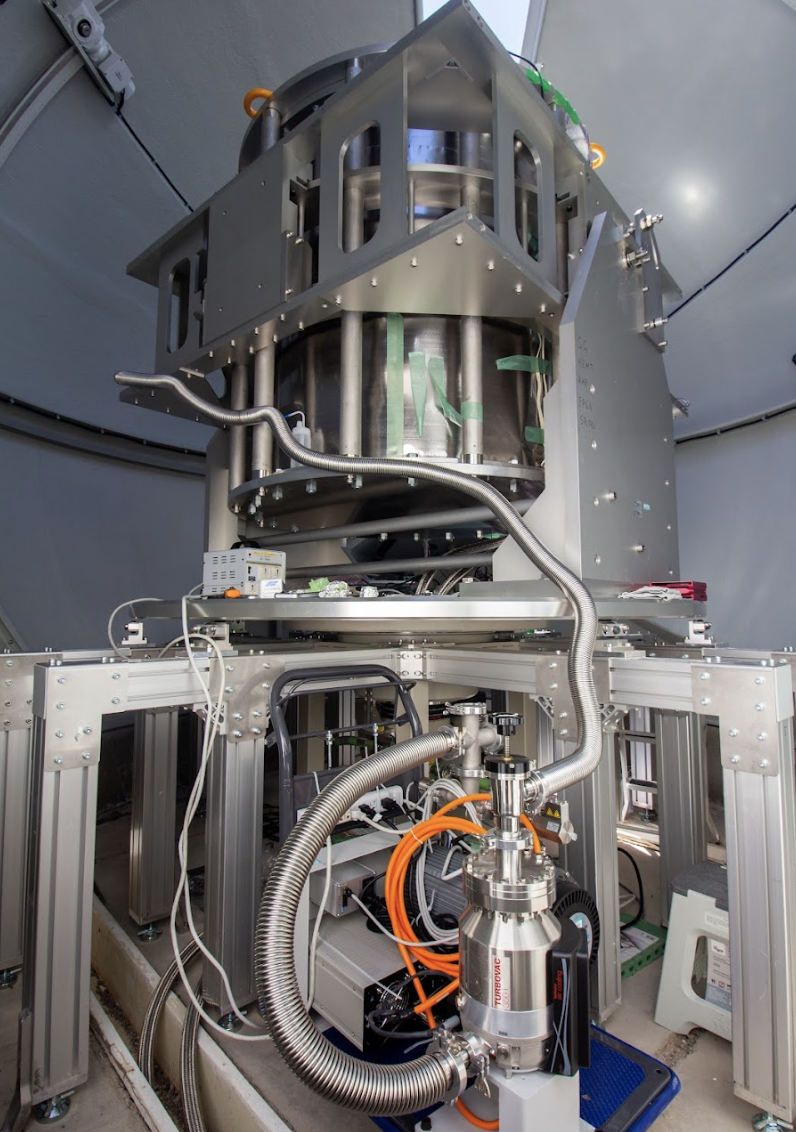
“The telescope is designed to achieve the highest sensitivity for wide sky observation, with a continuous high rotation speed of 120°/s to suppress atmospheric fluctuations,” explains Mike Peel, part of a team of astronomers from Japan, Korea, Spain, and The Netherlands who developed and work on the GroundBIRD project.
Achieving precise observations with the telescope involves multiple Raspberry Pi monitors keeping an eye on the telescope’s hardware operations, such as controlling its rotation speed and the temperature, humidity, and pressure in the telescope dome, in addition to monitoring the prevailing weather conditions.
Communication hub
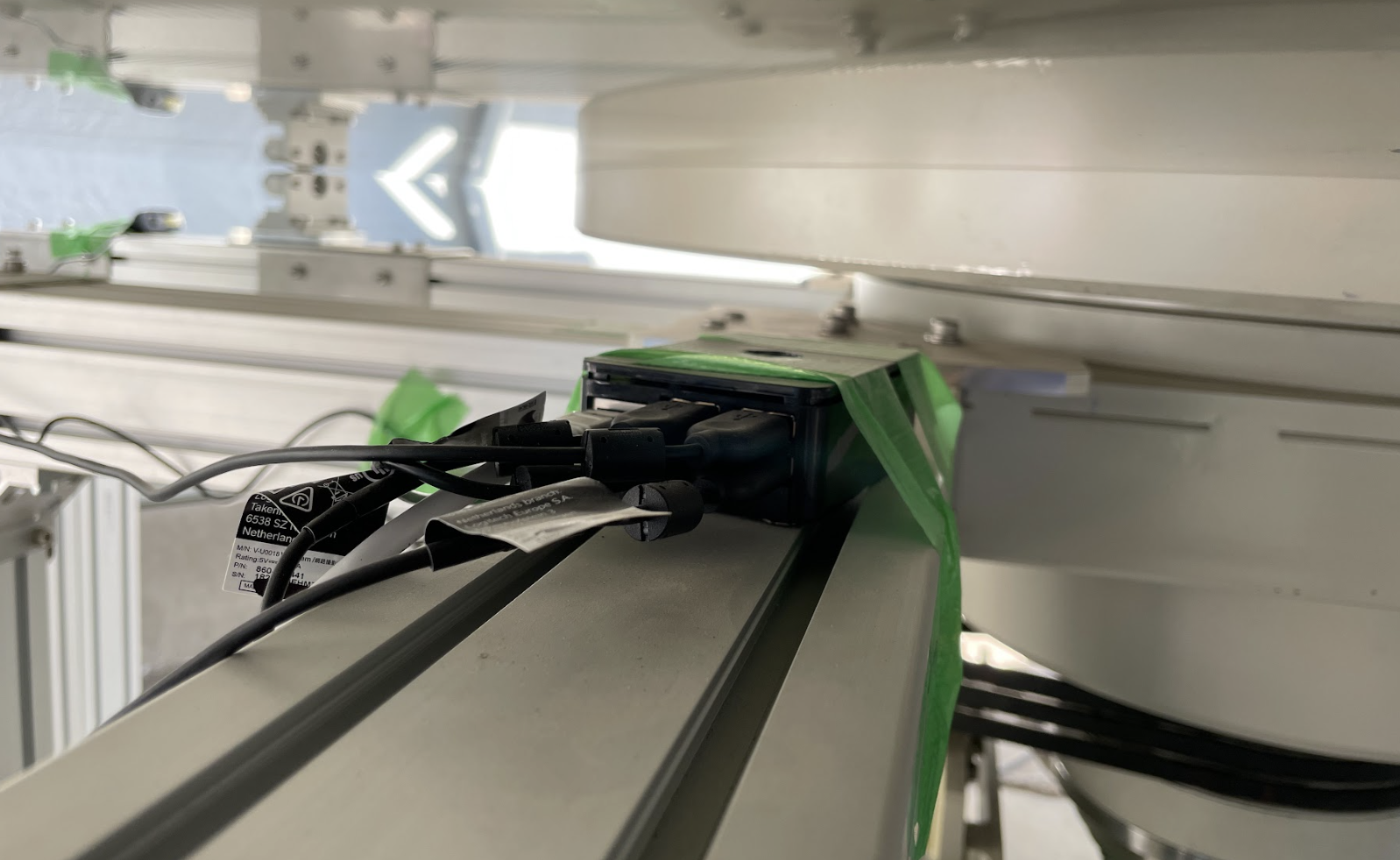
GroundBIRD uses a number of Raspberry Pi computers – one for each hardware/sub-project evaluation – each of which is developed and tested independently before all the hardware is installed directly into the telescope. This approach meant troubleshooting one Raspberry Pi-enabled feature didn’t hold back progress with other elements of the project. The sensors, monitoring instruments, and FPGA (field-programmable gate array) circuitry were also bought as off-the-shelf components and adapted for the project’s needs using the wealth of useful information readily available online about how to use Raspberry Pi for specific purposes. Much of the development work involved ways to enable modules to communicate with the Raspberry Pi server.

The GroundBIRD telescope was initially developed and constructed in Japan and transported to the Teide Observatory in the Canary Islands in 2018.Code written for the project was first shared locally using GitLab, but will eventually be available on GitHub. Communication is over a wired Ethernet, since wireless connections would interfere with the radio observatory’s signals. Python scripts from sensors or cameras connected to each Raspberry Pi relay information in real-time to the GroundBIRD server which consists of a desktop PC, two rack-mounted PCs, and seven Raspberry Pi computers. The dome is controlled solely by Raspberry Pi, whereas the humidity detector – which lets the researchers know it’s too damp to have the dome open – runs a different system.
The team assigned each of the six discrete Raspberry Pi boards a name, either of a fruit or a ground bird, so mango-pi, yuzu-pi, pera-pi weather sensor, kaki-pi, choco-pi, and momo-pi. Most of these were adapted and up and running in the space of a few days, whereas the more complex FPGA coding for the angle encoder took several months of development. This was also the most costly element, aside from the hardware associated with the telescope itself.
Fruits of their labour
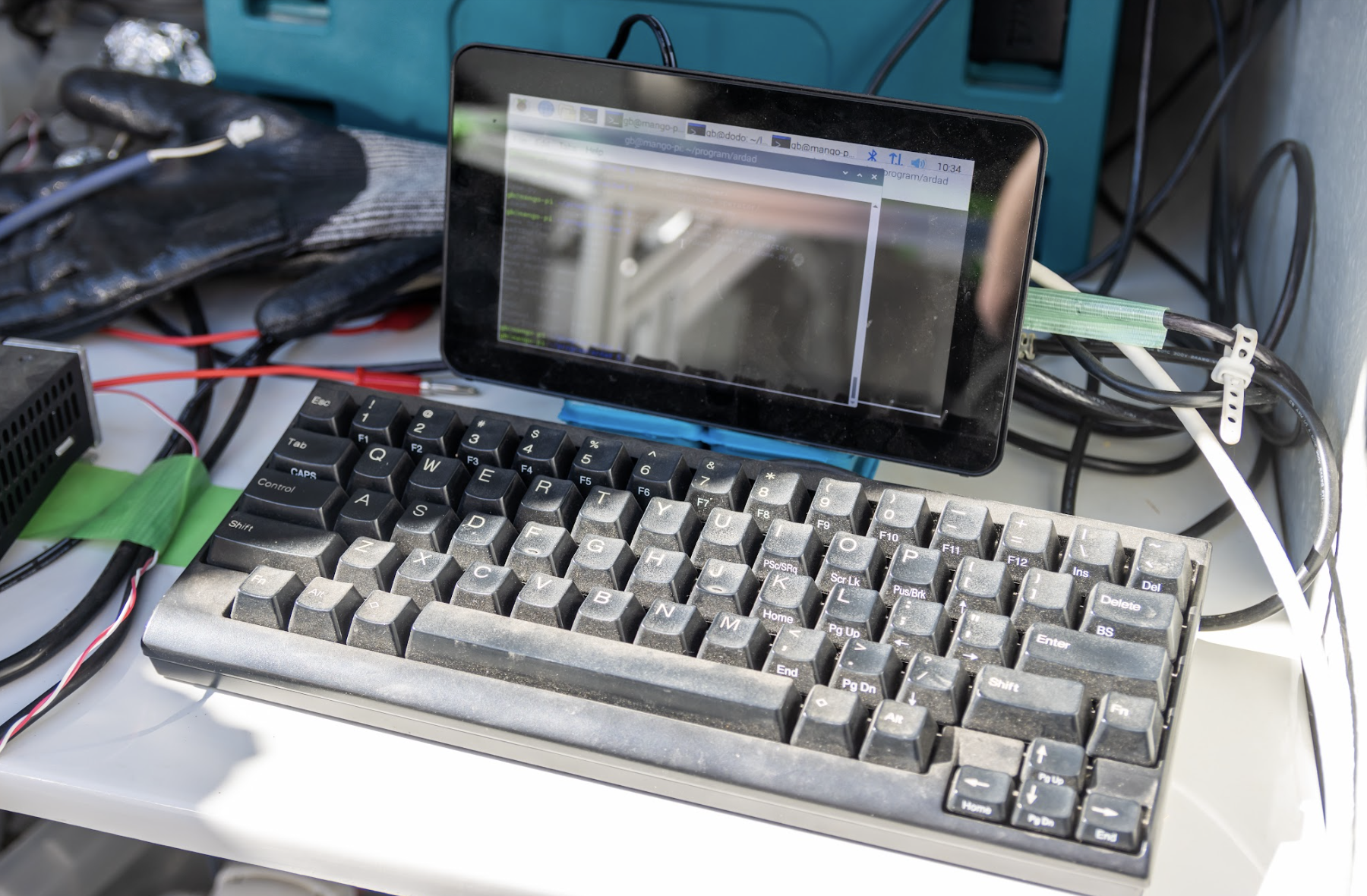
Although space is limited in the dome, the team was keen to install a very small PC and display. Raspberry Pi and a small touchscreen display seemed an obvious choice. This device, mango-pi, checks all DAQ connections before adjusting the telescope’s elevation or starting it moving. This same computer also controls the dome while the main server for GroundBIRD observation continuously rotates together with the telescope, and therefore cannot be connected from the dome control. Another Raspberry Pi, yuzu-pi, is fitted with a DAC HAT and has an SPI connection to the telescope’s azimuth controller. By changing the voltage to the azimuth controller, it acts as an emergency stop mechanism should it be necessary to prevent the fully remotely-controlled telescope from continuing to rotate.
Choco-pi trains four cameras on the telescope’s wheels, while momo-pi listens for unexpected noises related to the telescope’s rotation and acts as an early warning system for potential problems. “The pulse-tube-cooler (the cryostat cooling down from the room temperature to 4 Kelvin [-269°C] inside the telescope) also generates periodical sound,” Mike explains. “It would be nice to measure this to see whether there is something odd around the cryocoolers.” Finally, coco-pi is fitted with an ADS-B receiver and keeps an eye out for aeroplanes. The observatory is in a no-fly zone, so few aircraft are likely to pass by. However, its high altitude means the small antenna is able to detect aircraft up to around 500 km away.