
A great deal of building maintenance expenses are the result of simple inaccessibility. Cleaning the windows are your house is a trivial chore, but cleaning the windows on a skyscraper is serious undertaking that needs specialized equipment and training. To make exterior wall tile inspection efficient and affordable, the GLEWBOT team turned to nature for inspiration.
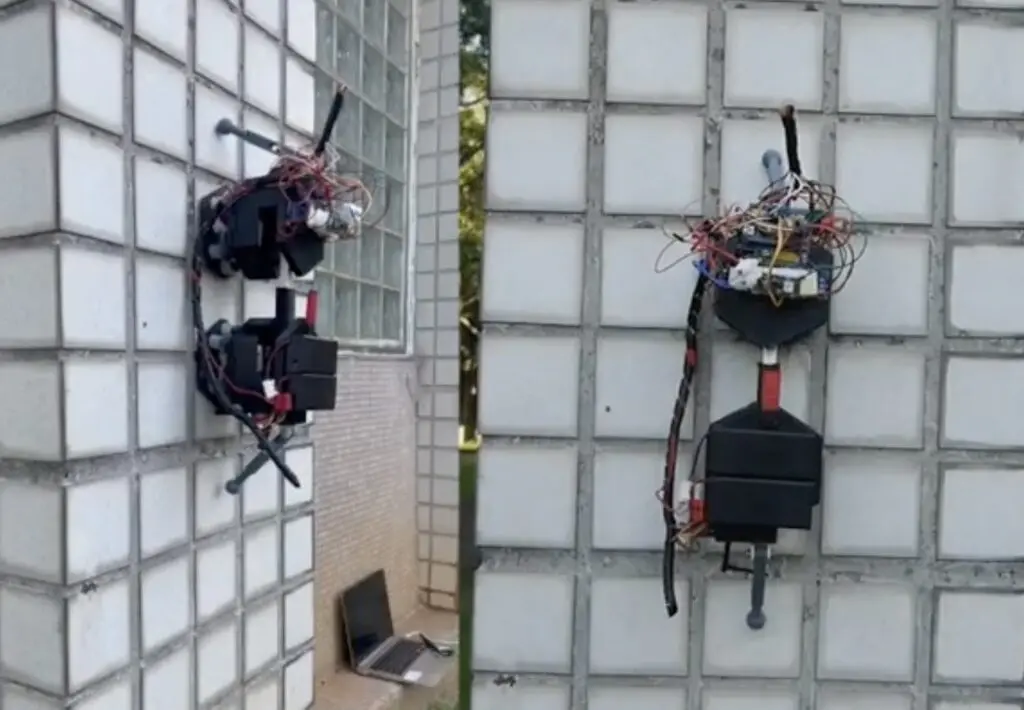
GLEWBOT climbs up walls like a gecko and taps on tiles like a woodpecker to evaluate wall integrity. Like cleaning the windows on a skyscraper, the traditional inspection method requires specialized tools and skills. GLEWBOT can perform the same functions autonomously, dramatically reducing costs.
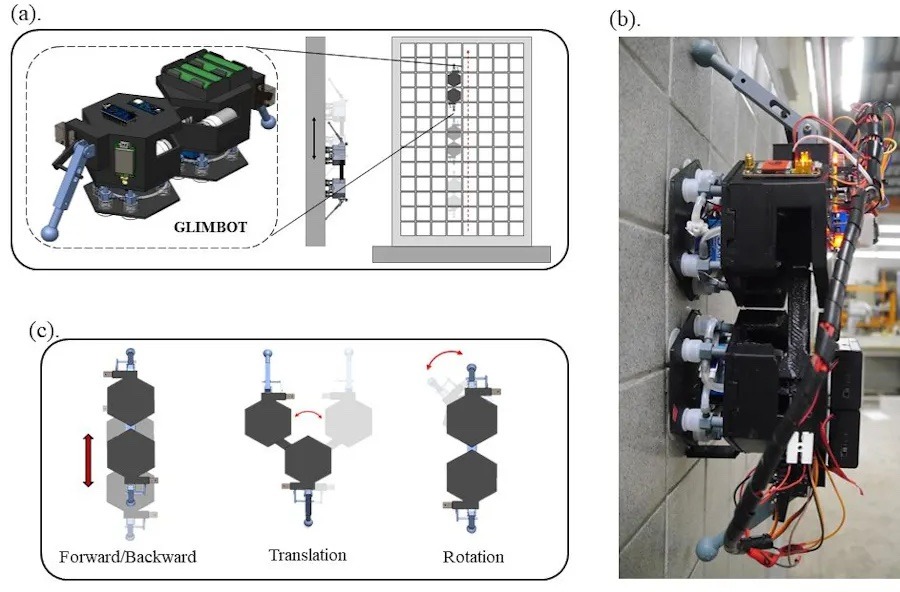
This robot has a two-part design that lets it scale walls in a manner similar to a climber using ascenders. One part grips, while the other releases. When the bottom part grips, the top part can extend to move up the wall. When the top part grips, the bottom part can retract to repeat the process. The robot grips the tile using suction cup feet connected to micro vacuum pumps and a linear actuator performs the extension/retraction. Each end has a motor that lets it rotate relative to the linear actuator, so the robot can turn.
The system is equipped with two Arduino boards. An Arduino Nano serves as central command and handles general functions, while an Arduino Nano 33 BLE Sense acts as an acoustic recognition module and controls the inspection tool. That tool is a hollow drum hammer that taps each tile and listens for the resulting echo. An audio classification model trained for this task will detect a questionable tile based on the sound it makes, so engineers can investigate further.
More details on GLEWBOT can be found in its Hackster.io write-up and the team’s published paper here.
The post GLEWBOT scales buildings like a gecko to inspect wall tiles appeared first on Arduino Blog.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.