
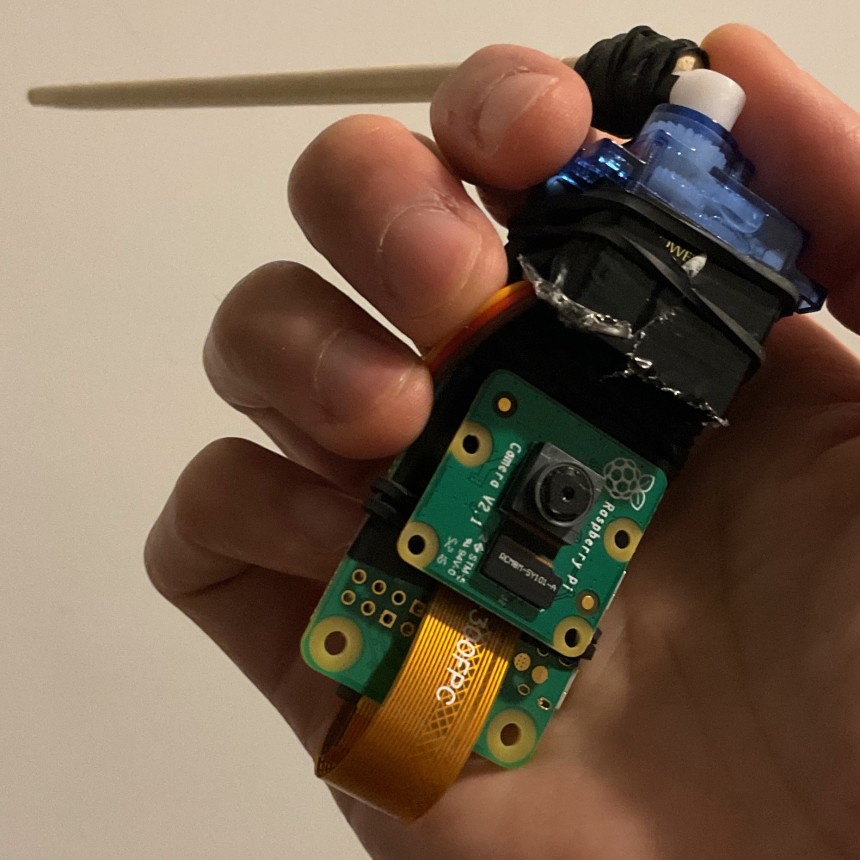
“I used Raspberry Pi because I was recently working with Raspberry Pi and cameras for another project, a digital sensor for a film camera,” says Michael. “Although there are definitely simpler solutions with cheaper microcontrollers, I find it valuable to start with techniques I know rather than going down rabbit holes of learning new tools. I used two separate boards because Raspberry Pi 5 is my home server and NAS, which I did not want to mount on the kitchen window.”
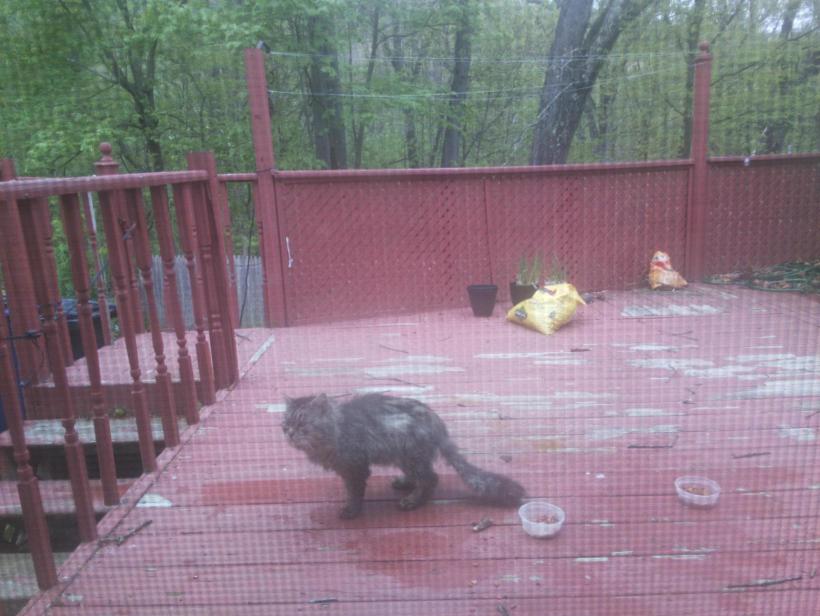
But there’s a catch: the food that Michael was leaving out for the cats was also attracting birds, for which cat food is potentially unhealthy, so he needed to find a way of identifying birds and scaring them away. He eventually settled on a minimal solution that just – only just – qualifies for the label of ‘robot’: an actuator (a Tower Pro micro servo) connected to a chopstick that taps on the window to scare the birds away. If Raspberry Pi 5 detects a bird, it sends a request to Raspberry Pi Zero to activate the servo.
“Defining ‘robot’ is hard to pin down and frequently leads to disagreement among roboticists,” says Michael. “I believe that a robot is any physical thing with sensors and actuators. While some definitions require autonomy, that excludes arguably robotic things like human-piloted mecha or heavy industrial equipment. Relaxing the requirement of autonomy frames robots as tools that complement rather than supplant our abilities, which I find valuable in the current hype wave of AI and ML.
“There are commercial products that do similar things, like the Bird Buddy or pet-oriented indoor security cameras. By the time that I could hack those to get the functionality I wanted, I might as well have started with open-source tools.”
“My favorite projects include Blossom, an open-source robot platform that I developed during my PhD, and the Leica MPi, a swappable digital sensor for a Leica film camera. I’m currently taking a sabbatical at the Recurse Center, a programming retreat in New York, where I am exploring alternative HCI hardware and brushing up on AIML for robotics.”