

Henry Evans suffered a brain-stem stroke 20 years ago that left him paralyzed with quadriplegia. He can move his head, but other than a small amount of movement in his left thumb, he can’t control the rest of his body. To help Evans live a more independent life, researchers from Carnegie Mellon University’s School of Computer Science developed a motion control interface that lets him operate a mobile robot.
The robot is a Stretch model from Hello Robot, which can navigate a home on its mobile base, interact with objects using its arm and gripper, and provide a live view through a pair of cameras (one on its head and one on its gripper). But this telepresence robot doesn’t have any provisions for operation by a person with quadriplegia like Evans. That’s where the SCS team came in.
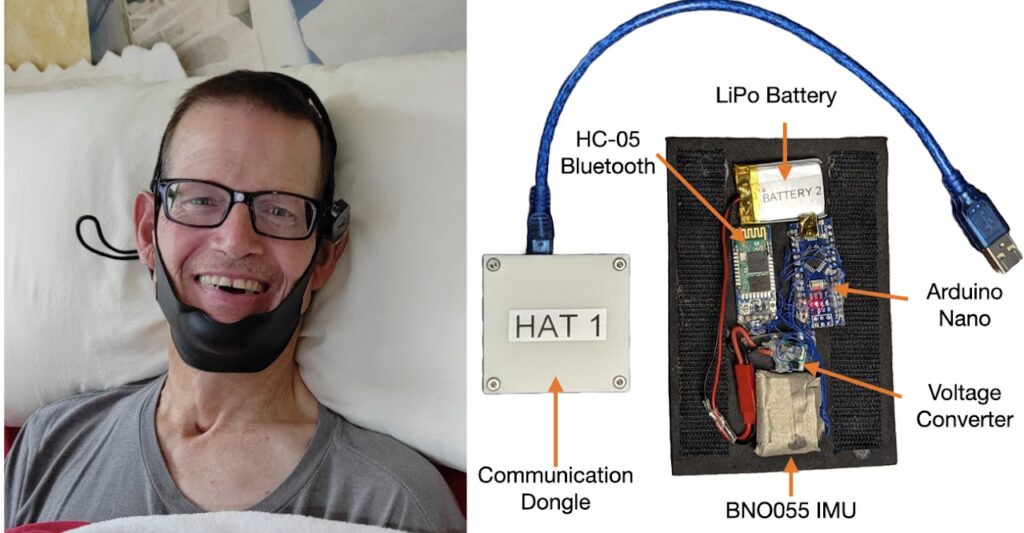
They created a head-worn motion control interface consisting of an Arduino Nano board, a Bosch BNO055 IMU and an HC-05 Bluetooth module. The Arduino monitors Evans’s head movement with the IMU, then sends cursor movement commands over Bluetooth to the computer running the software that controls the Stretch robot. That lets Evans move the cursor on the screen, and then he can click a mouse button thanks to the limited movement of his left thumb.
During a week-long testing session, Evans successfully used this system to perform many tasks around his home. He was able to use the robot to pick up tissues and bring them to his face, and even to adjust the blinds on his bedroom window. Clever “Drivers Assistance” software lets the robot operate semi-autonomously in order to complete tasks that would have been difficult for Evans to accomplish through manual control.
While the Stretch robot is expensive at about $25,000 dollars, the HAT (Head-worn Assistive Teleoperation) control interface is affordable. This is just a prototype, but a device like this could help many people around the world living with quadriplegia and other conditions that affect motor control.