
A popular goal among roboticists is animal-like locomotion. Animals move with a fluidity and grace that is very hard to replicate artificially. That goal has led to extremely complex robots that require a multitude of motors and sensors, along with heavy processing, to walk. But even those don’t quite match biological movement. Taking a new approach, engineers from Carnegie Mellon University and the University of Illinois Urbana-Champaign created a simple bipedal robot named “Mugatu” that walks using a single actuator.
This approach is counter-intuitive, but quite sensible when we actually look at the gaits of real animals. Bipedal animals, such as humans, don’t need to engage many muscles when walking on flat surfaces. We achieve that efficiency with balance and body geometry evolved for this purpose. In a sense, a walking human is always falling forward slightly and redirecting their inertia to take a step. This robot walks in a similar manner and only needs a motor to move one leg forward relative to the other.
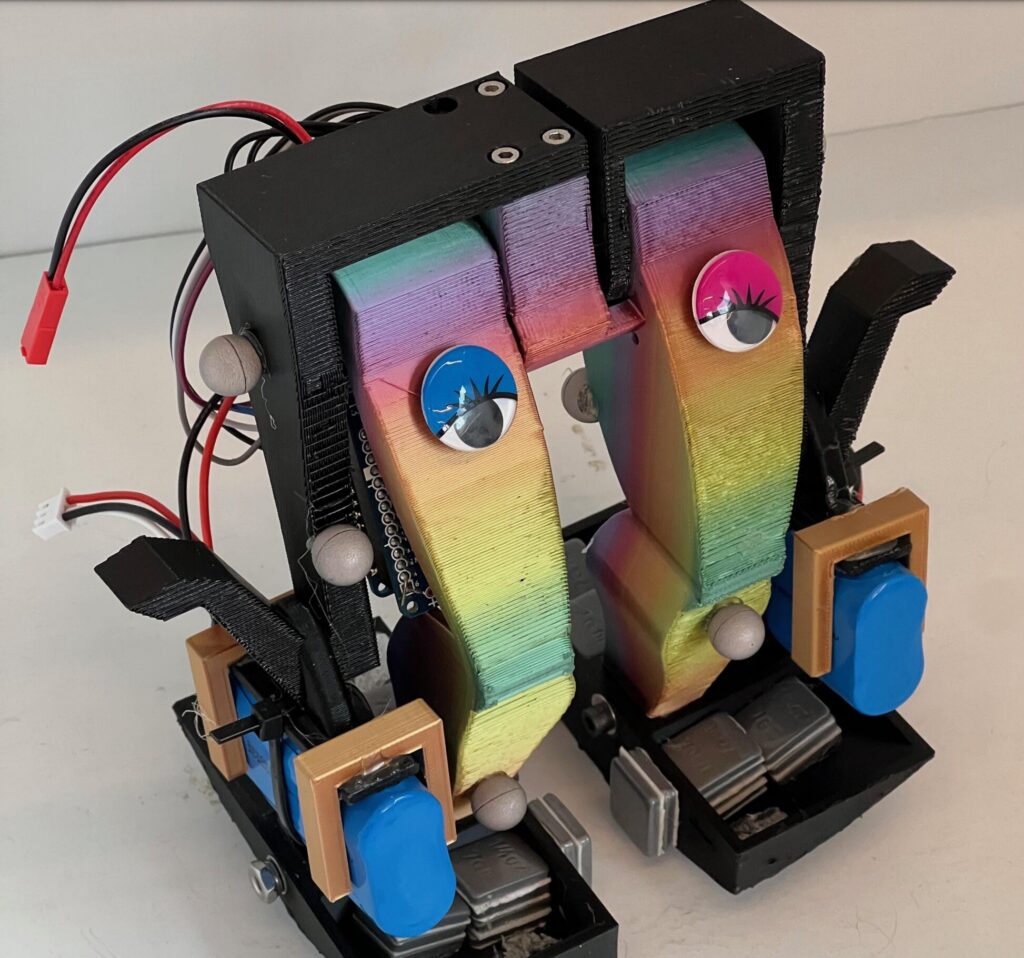
The team built Mugatu using 3D-printed legs connected by a servo “hip” joint. An Arduino MKR Zero board controls that motor, moving it with the precise timing necessary to achieve the “continuous falling” gait. This prototype doesn’t utilize it yet, but there is also an IMU in the left leg that could provide useful feedback data in the future. For now, the robot relies on pre-programmed movements.
While the prototype Mugatu has little utility, the research could prove to be indispensable for developing more natural gaits with fewer actuators.
Image credit: J. Kyle et al.
The post Bipedal robot walks with a single motor appeared first on Arduino Blog.
Website: LINK